PI普爱 H-860 六轴运动六足位移台
PI普爱 H-860 六轴运动六足位移台 磁性直接驱动器可实现高速度 高速度和高动态 低内部移动质量 速度高达250毫米/秒 精密路径跟踪 无摩擦音圈驱动器 产品描述 由于其出色的动态特性,H-860非常适合于运动仿真。 它用于测试系统,例如用于摄影机和移动设备中的图像稳定。应用的其他领域包括摄影机测试系统和图像稳定软件的质量保证;振动仿真、眼动跟踪、人类和人工运动的仿真。 无摩擦驱动器设计基于音圈驱动器和柔性铰链导向。支撑腿和平台由碳纤维制成,可很大程度地减少运动质量和惯性。 PIMag音圈 音圈驱动器由两个基本元件组成:永磁体和位于磁场气隙中的线圈。音圈驱动器重量轻并且基于无摩擦驱动原理,因此特别适合在有限行程内要求高动态性和高速度的应用。这类驱动器还可提供高扫描频率和精密定位,因为它们不存在磁滞效应。 并联运动6轴系统 六自由度并联运动设计使其比串联运动系统更加紧凑、更具刚性,无移动电缆。 预定义运动曲线的高精度准确运行:正弦曲线和自定义轨迹。 规格 Select a travel range: 7,5 mm 运动和定位 H-860.S2H 单位 公差...
分类:
货号:
H-860

描述
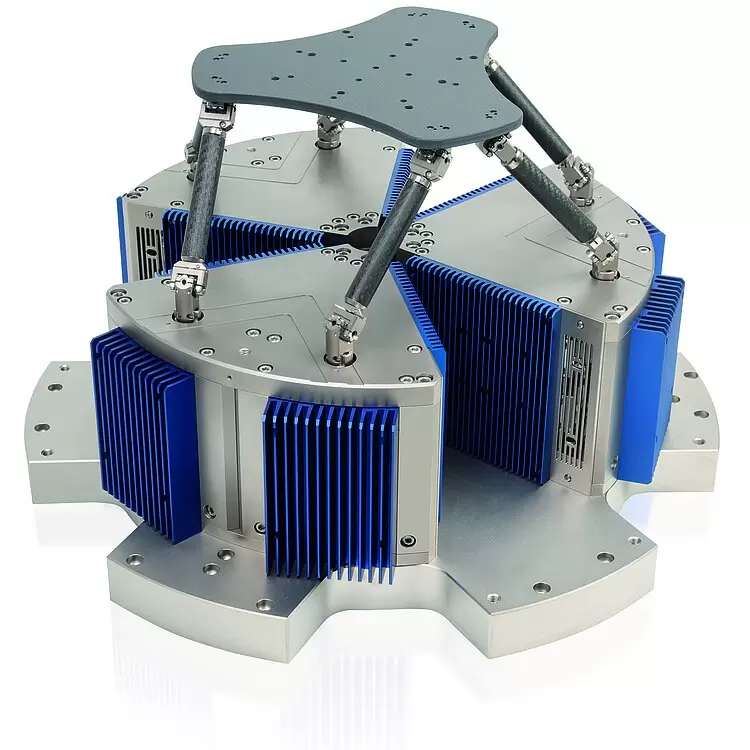
PI普爱 H-860 六轴运动六足位移台
磁性直接驱动器可实现高速度
- 高速度和高动态
- 低内部移动质量
- 速度高达250毫米/秒
- 精密路径跟踪
- 无摩擦音圈驱动器
产品描述
由于其出色的动态特性,H-860非常适合于运动仿真。
它用于测试系统,例如用于摄影机和移动设备中的图像稳定。应用的其他领域包括摄影机测试系统和图像稳定软件的质量保证;振动仿真、眼动跟踪、人类和人工运动的仿真。
无摩擦驱动器设计基于音圈驱动器和柔性铰链导向。支撑腿和平台由碳纤维制成,可很大程度地减少运动质量和惯性。
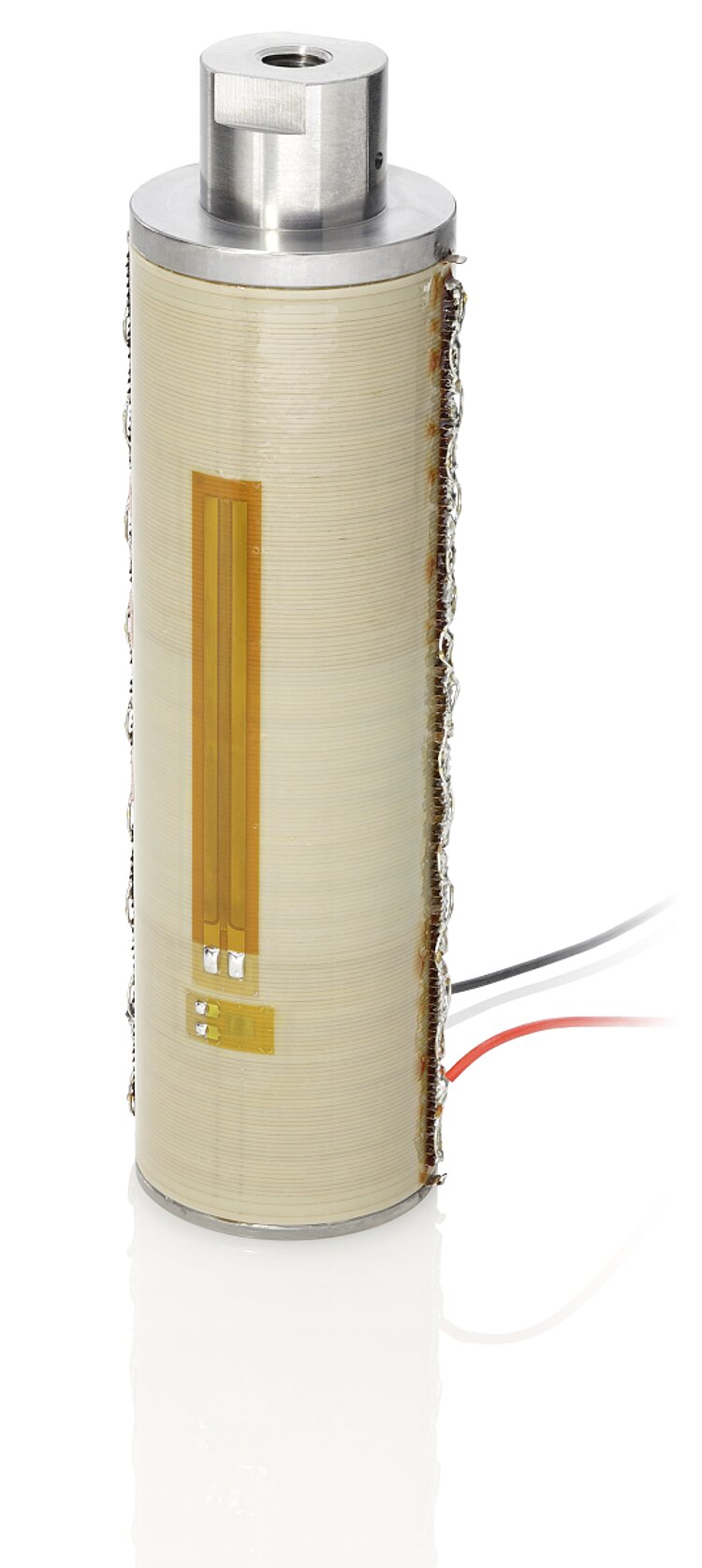
PIMag音圈
音圈驱动器由两个基本元件组成:永磁体和位于磁场气隙中的线圈。音圈驱动器重量轻并且基于无摩擦驱动原理,因此特别适合在有限行程内要求高动态性和高速度的应用。这类驱动器还可提供高扫描频率和精密定位,因为它们不存在磁滞效应。
并联运动6轴系统
六自由度并联运动设计使其比串联运动系统更加紧凑、更具刚性,无移动电缆。
预定义运动曲线的高精度准确运行:正弦曲线和自定义轨迹。
规格
|
运动和定位 |
H-860.S2H |
单位 |
公差 |
|---|---|---|---|
|
主动轴 |
X、Y、Z、θX、θY、θZ |
|
|
|
X、Y和Z向上的行程* |
±7.5 |
毫米 |
|
|
θX、θY和θZ向上的行程* |
±4 |
度 |
|
|
促动器设计分辨率 |
5 |
纳米 |
|
|
X、Y向上的最小位移 |
1 |
微米 |
典型值 |
|
Z向上的最小位移 |
1 |
微米 |
典型值 |
|
θX、θY、θZ向上的最小位移 |
9 |
微弧度 |
典型值 |
|
X、Y向上的空回 |
0.2 |
微米 |
典型值 |
|
Z向上的空回 |
0.06 |
微米 |
典型值 |
|
θX、θY向上的空回 |
4 |
微弧度 |
典型值 |
|
θZ向上的空回 |
4 |
微弧度 |
典型值 |
|
X、Y向上的单向重复精度 |
±0.5 |
微米 |
典型值 |
|
Z向上的单向重复精度 |
±0.5 |
微米 |
典型值 |
|
θX、θY向上的单向重复精度 |
±9 |
微弧度 |
典型值 |
|
θZ向上的单向重复精度 |
±9 |
微弧度 |
典型值 |
技术参数为 20±3 °C下的数值。
* 单个坐标(X、Y、Z、θX、θY和θZ)的行程相互依赖。本表中各轴对应的数值为其最大行程,此时其他轴和枢轴点位于参考位置。
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com