PI普爱 V-625.A100 高精度直接驱动旋转平台

PI普爱 V-625.A100 高精度直接驱动旋转平台
理想的索引、定位、扫描、测量技术
规格
| Motion | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | Tolerance |
|---|---|---|---|---|---|---|---|
| Active axes | θZ | θZ | θZ | θZ | θZ | θZ | |
| Rotation range in θZ | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | |
| Maximum angular velocity in θZ, unloaded | 1200 rpm | 1000 rpm | 200 rpm | 1200 rpm | 1000 rpm | 200 rpm | |
| Radial error in X | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | typ. |
| Axial error | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | ± 2 µm | typ. |
| Tilt error around X (wobble) | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | typ. |
| Positioning | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | Tolerance |
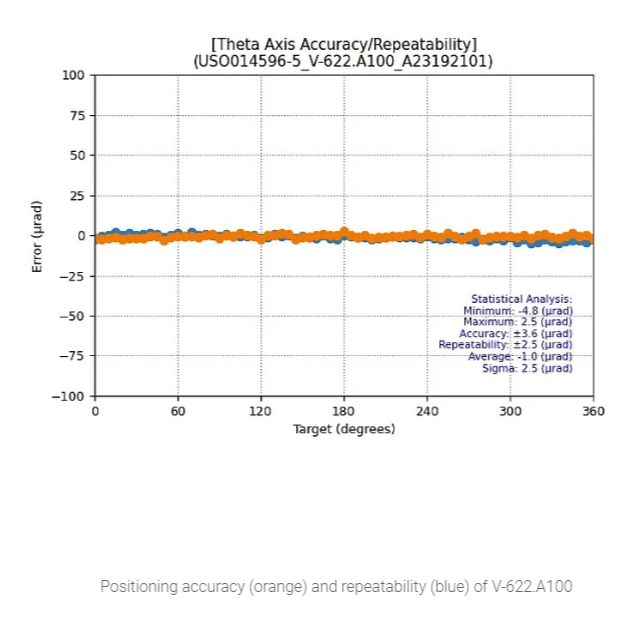
| Positioning accuracy in θZ, calibrated | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | typ. |
| Bidirectional repeatability in θZ | 10 µrad | 10 µrad | 5 µrad | 10 µrad | 10 µrad | 5 µrad | typ. |
| Reference switch | 1/revolution, differential pulse over one sensor signal period, 1 V peak-peak | 1/revolution, differential pulse over one sensor signal period, 1 V peak-peak | 1/revolution, differential pulse over one sensor signal period, 1 V peak-peak | — | — | — | |
| Integrated sensor | Incremental angle-measuring system | Incremental angle-measuring system | Incremental angle-measuring system | Absolute angle-measuring system | Absolute angle-measuring system | Absolute angle-measuring system | |
| Sensor signal | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | BiSS-C, 32-bit | BiSS-C, 32-bit | BiSS-C, 32-bit | |
| Sensor signal periods/U | 11840 | 15744 | 31488 | — | — | — | |
| Sensor resolution, rotational | 0.13 µrad | 0.097 µrad | 0.049 µrad | 0.0015 µrad | 0.0015 µrad | 0.0015 µrad | |
| Drive Properties | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | Tolerance |
| Drive type | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | Ironless 3-phase torque motor | |
| Peak voltage | 80 V | 80 V | 80 V | 80 V | 80 V | 80 V | |
| Nominal current, RMS | 4.9 A | 4.6 A | 4.3 A | 4.9 A | 4.6 A | 4.3 A | typ. |
| Peak current, RMS | 13.8 A | 13.8 A | 13.8 A | 13.8 A | 13.8 A | 13.8 A | typ. |
| Drive torque in θZ | 0.57 N·m | 1.4 N·m | 4.1 N·m | 0.57 N·m | 1.4 N·m | 4.1 N·m | |
| Peak torque in θZ | 1.22 N·m | 2.9 N·m | 9.3 N·m | 1.22 N·m | 2.9 N·m | 9.3 N·m | |
| Torque constant | 0.117 N·m/A | 0.3 N·m/A | 0.96 N·m/A | 0.117 N·m/A | 0.3 N·m/A | 0.96 N·m/A | typ. |
| Resistance phase-phase | 1.7 Ω | 2.76 Ω | 4.94 Ω | 1.7 Ω | 2.76 Ω | 4.94 Ω | typ. |
| Inductance phase-phase | 2.7 mH | 5.2 mH | 9.8 mH | 2.7 mH | 5.2 mH | 9.8 mH | |
| Back EMF, phase-phase, rotational | 10 V/kRPM | 25 V/kRPM | 82 V/kRPM | 10 V/kRPM | 25 V/kRPM | 82 V/kRPM | max. |
| Number of pole pairs | 12 | 20 | 36 | 12 | 20 | 36 | |
| Mechanical Properties | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | Tolerance |
| Permissible push force in X | 50 N | 75 N | 100 N | 50 N | 75 N | 100 N | max. |
| Permissible push force in Y | 50 N | 75 N | 100 N | 50 N | 75 N | 100 N | max. |
| Permissible push force in Z | 100 N | 150 N | 400 N | 100 N | 150 N | 400 N | max. |
| Permissible torque in θX | 5 N·m | 10 N·m | 20 N·m | 5 N·m | 10 N·m | 20 N·m | max. |
| Permissible torque in θY | 5 N·m | 10 N·m | 20 N·m | 5 N·m | 10 N·m | 20 N·m | max. |
| Moment of inertia in θZ, unloaded | 331 kg·mm² | 1188 kg·mm² | 26000 kg·mm² | 331 kg·mm² | 1188 kg·mm² | 26000 kg·mm² | ±20 % |
| Bearing type | Ball bearings | Ball bearings | Ball bearings | Ball bearings | Ball bearings | Ball bearings | |
| Overall mass | 1300 g | 2400 g | 11000 g | 1300 g | 2400 g | 11000 g | ±5 % |
| Material |
Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
Hardcoat aluminum (base body), stainless steel (bearing and mounting hardware) |
|
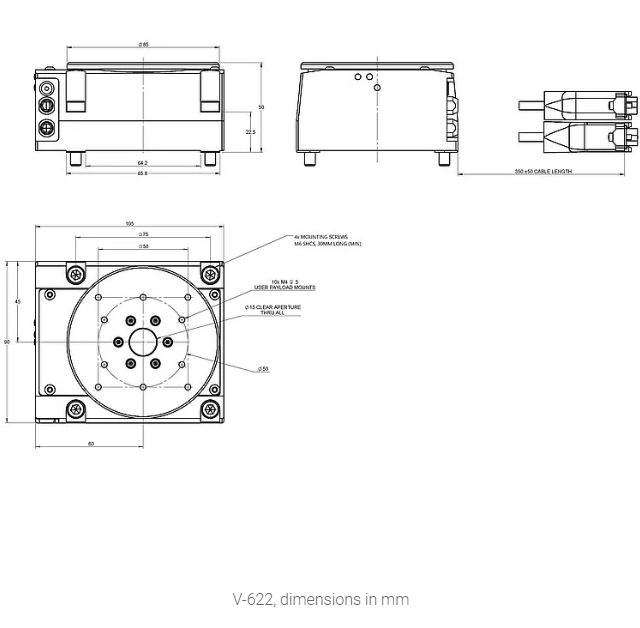
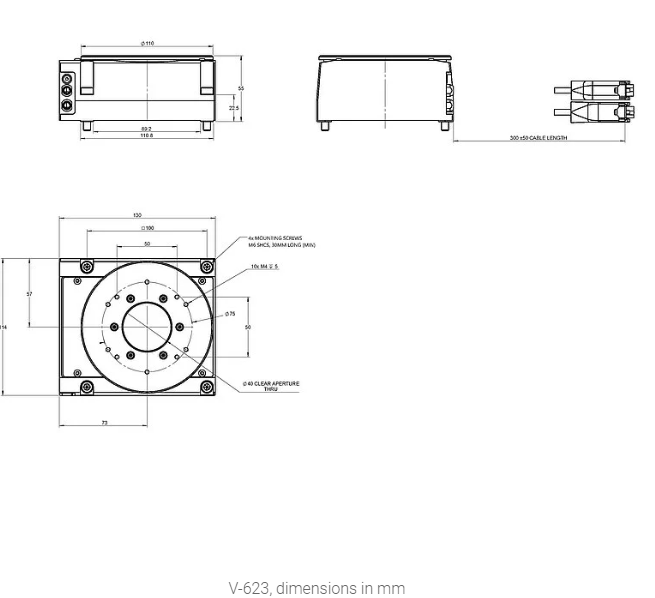
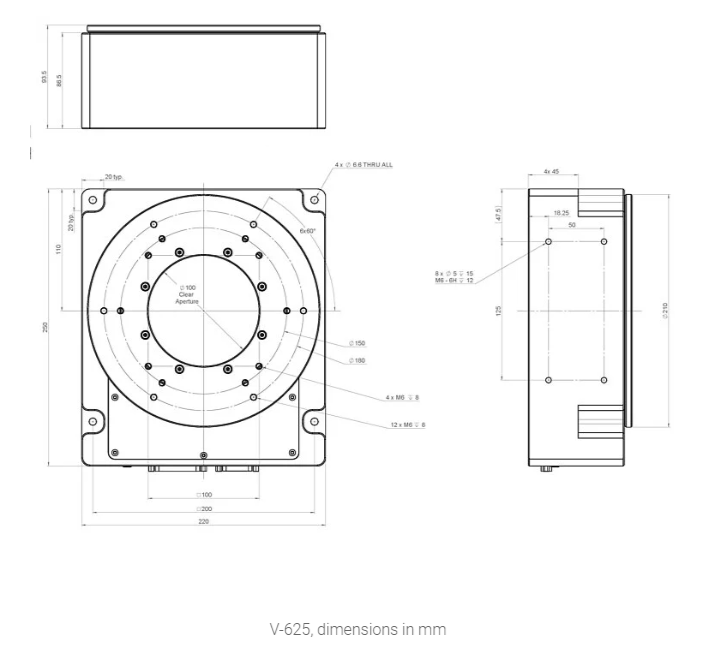
| Aperture diameter | 15 mm | 40 mm | 100 mm | 15 mm | 40 mm | 100 mm | |
| Motion platform diameter | 85 mm | 110 mm | 210 mm | 85 mm | 110 mm | 210 mm | |
| Height | 50 mm | 55 mm | 93.5 mm | 50 mm | 55 mm | 93.5 mm | |
| Miscellaneous | V-622.A100 | V-623.A100 | V-625.A100 | V-622.B100 | V-623.B100 | V-625.B100 | Tolerance |
| Operating temperature range | 5 to 50 °C | 5 to 50 °C | 5 to 50 °C | 5 to 50 °C | 5 to 50 °C | 5 to 50 °C | |
| Connector | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | D-sub 9W4 (m) | |
| Sensor connector | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | D-sub 15 (m) | |
| Recommended controllers/drivers |
A-81x, A-82x |
A-81x, A-82x |
A-81x, A-82x |
A-81x, A-82x |
A-81x, A-82x |
A-81x, A-82x |
关于线性及旋转串扰的说明:根据基础表面的质量、有效载荷、工作台的方向以及作用台上的外部力。请联系PI获取应用特定的参数。规定的值是静态的(测量期间没有旋转运动)且没有负载。
关于角的说明:可能会受到有效载荷不平衡、控制器或驱动器的限制。
关于A-62x.Axxx传感器分辨率的说明:4096x插值。使用其他因子时请联系PI。
关于定位精度的说明:规定的值是基于由控制器控制的误差补偿。达到这些值,工作台必须与PI的控制器一起订购。精度值假设为短时间,不考虑工作台的热漂移长期效应。
关于允许的推力和允许的扭矩的说明:最大负载能力是相互排斥的,例如,工作台可以用X/Y的最大允许推力加载,Z的最大允许推力加载,用θX/θY的最大允许扭矩加载。
在PI,技术数据在22 ±3 °C时。除非另有说明,否则这些值适用于无负载条件。一些属性是相互依赖的。标识“typ.”表示某个属性的统计平均值;并不代表每个供应的产品都有保证值。在产品的最终检查中,只有选定的属性被分析,而不是全部。请注意,某些产品特性可能会随着操作增加而恶化。
编码器类型
单轴或多轴运动控制器和伺服驱动器
多轴组件
应用领域
样品检查。微组装。研究。生物技术。半导体测试和检查。测量技术。自动化技术。设备组装。激光微加工。传感器校准和测试
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com